24/7
Уважаемые читатели!
Еще, будучи студентом МАИ на кафедре 105 - «Динамика полета и управления» на 4-м курсе выполнял работу по поиску оптимального управления для линейного динамического объекта 4-го или 5-го порядка. Относясь всегда добросовестно к учебе мне казалось, что курсовую работу я сделаю быстро и без особых усилий. Но получилось все наоборот. То, что было гладко на бумаге (в учебнике), на практике было сопряжено с необычайными трудностями.
Не помню, как я вышел из такого сложного положения, но на всю жизнь остались противоречивые чувства беспомощности. Только после этого я критически взглянул на преподнесенную нам (студентам) теорию оптимального управления. Но это было только начало пути моего становления как специалиста в области управления летательными аппаратами.
Проработав около семи лет на АНПК «МИГ» в «Отделе теории систем» стали появляться мысли, которые начали формироваться в идеи, позволяющие без особого ущерба к точности на инженерном уровне решать задачи оптимизации, но без использования интегрирования дифференциальных уравнений, опираясь только на передаточные функции (для линейных систем). В конечном итоге через несколько лет в голове и на бумаге, а главное в программах для ЭВМ в первом приближении был создан инструмент (система цифровых программ), позволяющий проводить анализ и синтез систем автоматического управления, включая и синтез оптимального управления.
В данном контексте необходимо отметить, что любимые для меня темы по математике (линейные дифференциальные уравнения и тригонометрические ряды Фурье) стали базисом собственной теории или метода. Мне казалось, что я совершил прорыв в инженерной деятельности в области управления. Теперь любой инженер в состоянии с некоторой долей погрешности и без особой математической подготовки решать задачи синтеза и анализа систем автоматического управления, используя простые и понятные алгоритмы. Я пытался донести это через публикации, но все мои попытки опубликовать в СССР полученные методы были безрезультатными. До 1990 года направлял статьи в «Ученые записки ЦАГИ», «Автоматику и телемеханику». Только когда рухнул Советский Союз, удалось многое опубликовать в журнале «Радиотехнические тетради».
Потом было не до этого. Около 14-и лет проработал на госслужбе. Выйдя на пенсию, вернулся к старому. Об этом можно определенно сказать, что «старая любовь не ржавеет»!
Приятного всем чтения!
https://sci-article.ru/stat.php?i=1462450870
Статья опубликована в №34 (июнь) 2016
Размещена 06.05.2016. Последняя правка: 08.05.2018.
НЕКОТОРЫЕ ОСОБЕННОСТИ РЕШЕНИЯ ЛИНЕЙНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ В ЗАДАЧАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
2024-10-06
Утешев Игорь Петрович
Аннотация:
В данной статье описываются условия, при которых общее решение линейных дифференциальных уравнений с постоянными коэффициентами состоит исключительно из частного решения неоднородного уравнения. Данные условия позволяют для отдельных задач упростить и унифицировать процедуру поиска общего решения дифференциального неоднородного уравнение с постоянными коэффициентами.
Abstract:
This article describes the conditions under which the General solution of linear differential equations with constant coefficients consists exclusively of a particular solution of the inhomogeneous equation. These terms allow for individual tasks to simplify and unify the procedure for finding the General solution of inhomogeneous differential equation with constant coefficients.
Ключевые слова:
дифференциальное уравнение; периодическое решение; переходная функция; оптимальное управление.
Keywords:
Differential equation; periodic solution; the transition function; optimal control.
УДК 51
Актуальность статьи заключается в том, что в ней показаны условия, при которых общее решение линейных дифференциальных уравнений с постоянными коэффициентами состоит исключительно из частного решения неоднородного уравнения.
Введение
Раздел математики, который рассматривается в данной статье, по праву считается архаичным и незыблемым. И это понятно, так как уже несколько сотен лет теория решения линейных дифференциальных уравнений с постоянными коэффициентами успешно выполняет свое предназначение.
Тем не менее, использование отлаженной методики всё-таки вызывает некоторые вопросы, связанные с зависимостью решения однородного дифференциального уравнения от типа собственных значений характеристического полинома. Имеется в виду зависимость решения от кратности собственных значений, а также от того, являются ли они действительными или комплексными. Кроме этого присутствует неизбежность определять сами собственные значения, процедура определение которых базируется для большинства случаев на использовании только численных методов. В настоящее время с необычайным развитием вычислительной техники этой проблемы как бы не стало. Несложная процедура численного определения собственных значений полинома, помноженная на быстродействие, свела практически к нулю все сложности. А если нет проблем, то нет и мотивации искать что-то новое. И не нужно уже смотреть под ноги, когда перед нами ровная дорога. Только вперед!
Ее осветил нам великий Леонард Эйлер, введя в математику экспоненту - ex. Несмотря на то, что число «e» в этой функции является иррациональным, вычисленное в настоящее время до невообразимой точности, эта функция стала по праву «царицей» в разделах математики, связанных с дифференциальным исчислением. И по понятным причинам отношение к царственным особам было перенесено в полной мере и на экспоненту. Хотя возникает чувство, что предложенная процедура выглядит как «навязанная неизбежность» (оценочное суждение). Как неизбежная расплата за первый эффектный шаг – представление решения в виде eλx. Только на первом шаге эта функция суперэффективна, позволяя перейти из дифференциального пространства в привычное для нас алгебраическое. Почти все дальнейшие шаги сопряжены с трудностями, отдельные из которых, как оказалось, теоретически непреодолимы. Появились комплексные собственные значения, причина появления которых является невозможность в рамках экспоненциальных функций описать колебательные процессы. Таким образом, вскрылась еще некоторая ущербность использования экспоненты, которая была «закамуфлирована» формулой Эйлера exj=Cos(x)+jSin(x).
Но мы все равно говорим Леонарду Эйлеру спасибо за то, что он предложил однозначную процедуру формирования решений линейных дифференциальных уравнений.
В данной статье рассматриваются условия и конкретные типы задач, при которых знание собственных значений характеристического полинома при решении линейных дифференциальных уравнений не является обязательным.
Условия, при котором общее решение неоднородного линейного дифференциального уравнения равно частному решению неоднородного уравнения
Пусть дифференциальное неоднородное уравнение n-го порядка имеет вид
any(n) + an-1y(n-1) +…+ a1y(1) + a0y = u(x), (1)
где: a0 , a1 , a2 , … , an - константы;
u(x) – функция от x.
Для дифференциального уравнения (1) общее решение yобщ записывается следующим образом
yобщ = yодн + yнеодн, (2)
где: yодн - решение однородного дифференциального уравнения;
yнеодн – частное решение неоднородного дифференциального уравнения.
В соответствии с теорией [1, с.509,510] решение однородного дифференциального уравнения представляется суммой соотношений типа

где:
λr– действительное собственное значение кратности m;
C1, C2, C3,…,Cm– коэффициенты;
αi – действительная часть для i-х парносопряженных собственных значений;
βi – модуль мнимой части для i-х парносопряженных собственных значений;
k – кратность для i-х парносопряженных собственных значений;
Ai1, Ai2,…, Aik,Di1, Di2,…, Dik, – коэффициенты для i-х парносопряженных собственных значений.
Пусть u(x) является ограниченной периодической функцией ua(x) с периодом равным ω. Тригонометрический ряд Фурье для ua(x) будет иметь следующий вид
ua(x)= d0+ d1Sin(ωx+f(ω))+ d2 Sin(2ωx+f(2ω) )+ d3 Sin(3ωx +f(3ω))+... , (4)
где: d0, d1, d2, d3,... – коэффициенты ряда Фурье;
f(ω) - значение фазы на частоте ω.
При этом, общее решение дифференциального уравнения (1) для u(x)= ua(x) будет также ограниченная периодическая функция ya(x) с периодом ω. Это означает, что периодическая функция ya(x) описывается тригонометрическим рядом Фурье с частотами кратными ω.
yобщ = ya(x)= y0+ y1Sin(ωx+ψ(ω))+ y2 Sin(2ωx+ψ(2ω) )+ y3 Sin(3ωx +ψ(3ω))+... , (5)
где: y0, y1, y2, y3,... – коэффициенты ряда Фурье;
ψ(ω) - значение фазы на частоте ω.
Для (1) решение частного неоднородного дифференциального уравнения определяется в соответствии с теорией [1, с.528-532], [2, с.61-65] для специальной правой части.
yнеодн = |W(0j) |d0+|W(ωj) |d1Sin(ωx+f(ω)+η(ω))+ |W(2ωj)|d2 Sin(2ωx+f(2ω)+η(2ω))+... , (6)
где: j – мнимая единица;
|W(0j)|, |W(ωj)|, |W(2ωj)|, … - значение амплитудно-частотной характеристики для (1) на соответствующей частоте;
η(ω) - значение фаза-частотной характеристики для (1) на частоте ω.
Подставляя в (2) соотношения (5) и (6) а также с учетом соотношений типа (3) для соответствующих собственных значений, можно утверждать, что в рамках принятых условий соотношение (2) будет выполняться, если коэффициенты A, D и С будут равны нулю. В этом случае экспоненты, которые априори являются непериодическими функциями, исчезают из решения (2). Остаются только периодические зависимости.
Однако в решении (2) могут присутствовать мнимые собственные значения для характеристического полинома, модуль которых совпадает с какой-либо частотой из тригонометрических рядов (4) и (6). Вероятность этого весьма мала и для практического использования данное замечание не может быть существенным, но знать об этом необходимо.
Таким образом, можно сформулировать свойство решения линейного дифференциального уравнения с постоянными коэффициентами, соответствующее частному случаю.
Если для дифференциального уравнения (1) u(x) и общее решение yобщ(x) являются ограниченными периодическими функциями с частотой ω, при этом, модули чисто мнимых собственных значений характеристического полинома уравнения (1) не являются кратными ω, то общее решение yобщ(x) совпадает с частным решением неоднородного дифференциального уравнения.
Практическое использование данного свойства
Для дифференциального уравнения (1) сформулированное свойство реализуется при переводе дифференциального уравнения из начального состояния покоя
Y0{y00; y01; … ;y0(n-1)} в конечное состояние покоя Yk{yk0; yk1; … ;yk(n-1)} и затем снова в начальное состояние покоя Y0,
где:
y00; y01; … ;y0(n-1) – значение решения y(x) и его производных в начальном состоянии покоя;
yk0; yk1; … ;yk(n-1) – значение решения y(x) и его производных в конечном состоянии покоя;
y01; … ;y0(n-1) и yk1; … ;yk(n-1) равны нулю.
Перевод динамического объекта, описываемого дифференциальным уравнением (1) из начального состояния покоя в конечное состояние покоя является распространенной технической задачей. Это, прежде всего, получение переходной функции, позволяющей вычислить критерии качества переходного процесса, которые дают объективную оценку динамическому объекту.
Рассмотренное выше свойство позволяет для устойчивых динамических объектов определять переходную функцию через соотношение (6) в виде тригонометрического ряда, при этом не требуется интегрирования дифференциального уравнения (1).
На рис.1 изображена ступенчатая периодическая функция ua(x), обеспечивающая решение устойчивого дифференциального уравнения (1) для a0=1 в виде периодической функции ya(x). Значение xп, соответствующее ступенчатому переключению в ua(x), теоретически должно быть равно бесконечности, так как только в этом случае в уравнении (1) обнуляются производные решения. Но в практической деятельности можно с несущественной погрешностью для конечного результата принять xп, соответствующее вполне реальному значению. Подробно это изложено в [5].
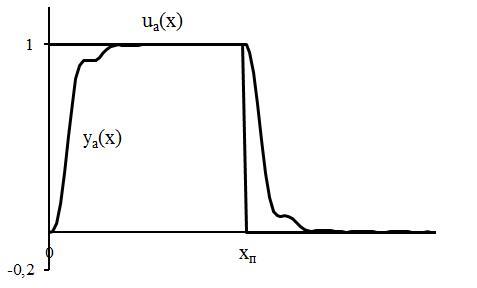
Рис. 1. Периодическая переходная функция ya(x) при периодическом воздействии ua(x).
В результате получаем тригонометрический ряд ya(x), описывающий на интервале
0 ÷ xп переходную функцию, а высокочастотные гармоники тригонометрического ряда соответствуют реальной амплитудно-частотной характеристике переходной функции. Анализ этих гармоник позволяет судить о влиянии высокочастотных гармоник на переходную функцию.
Рассмотренное свойство линейного дифференциального уравнения легло в основу методов анализа и синтеза линейных систем автоматического управления, изложенных в [4], [7].
Такой же подход можно применить и для импульсного воздействия. Для этого необходимо продифференцировать тригонометрический ряд, описывающий ya(x). В данном случае дифференцирование тригонометрического ряда является корректным, так как функция ya(x) являются непрерывной.
Наиболее интересным применением рассмотренного свойства линейного дифференциального уравнения является определение оптимального по быстродействию управления линейными динамическими объектами с ограничениями на управляющее воздействие. Данная задача практически не ставится на инженерном уровне ввиду её сложности для реальных систем. Тем не менее, для разработчика систем автоматического управления динамическими объектами всегда актуален вопрос о близости рассматриваемого закона управления к оптимальному закону.
Для уравнения (1) с действительными собственными значениями и управляющим воздействием umin≤ u(x) ≤umax в соответствии с теорией оптимальных по быстродействию процессов [3,с.138,139] оптимальным управлением является кусочно-постоянная функция, принимающая значения umax или umin и имеющая не более n-1 переключение, где n – порядок уравнения (1).
Как и в предыдущем случае, рассматриваем динамический процесс перевода дифференциального уравнения (1) из начального состояния покоя Y0{y00; y01; … ;y0(n-1)}в конечное состояние покоя Yk{yk0; yk1; … ;yk(n-1)} и затем снова в начальное состояние покоя Y0. На всем динамическом цикле ставится задача оптимального по быстродействию управления. Следовательно, на этапе перевода дифференциального уравнения из состояния Yk в состояние Y0 оптимальное по быстродействию управление также как и на первом этапе будет иметь не более n-1 переключение
Пусть uопт(x) является оптимальным управлением, переводящее уравнение (1) из начального состояния покоя Y0{y00; y01; … ;y0(n-1)}в конечное состояние покоя Yk{yk0; yk1; … ;yk(n-1)} и затем снова в начальное состояние покоя Y0. В этом случае u(x) равное uопт(x) является периодической функцией, а решением уравнения (1) для оптимального по быстродействию управления с учетом ранее изложенного свойства, будет частное решение неоднородного дифференциального уравнения (1) yопт(x)=yнеодн, которое также является периодическим.
На рис.2 изображен примерный вид решения yопт(x) уравнения (1) для n=4 при оптимальном управлении uопт(x).
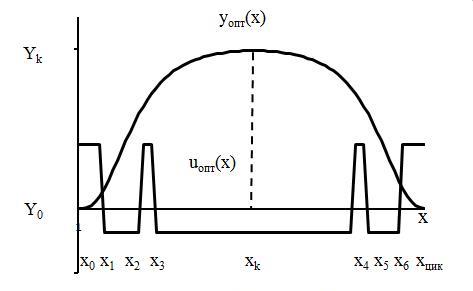
Рис. 2. Оптимальное по быстродействию управление uопт(x) и соответствующее решение yопт(x) уравнения (1) для n=4.
Для оптимального управления можно утверждать, что функционал
F = F0 + F1 + F2 + F3 = 0, (7)
где:
y0, yk – начальное и конечное значение функции y(x);
x0, xk – начальное и конечное значение аргумента (времени);
F0 = λ0 [(yопт(x0) – y0)2 + (yопт(xk) – yk)2];
F1 = λ1 [(yʹопт(x0) – 0)2 + (yʹопт(xk) – 0)2];
F2 = λ2 [(yʹʹопт(x0) – 0)2 + (yʹʹ опт(xk) – 0)2];
F3 = λ3 [(yʹʹʹопт(x0) – 0)2 + (yʹʹʹопт(xk) – 0)2];
λ0, λ1, λ2, λ3 – весовые положительные коэффициенты.
В соотношении (7) для оптимального управления будет выполняться условие F0 = F1 = F2 = F3 = 0.
Частота ω периодических функций uопт(x), yопт(x) вычисляется как ω=π/ xk.
Это справедливо для идеального случая, когда используемые тригонометрические ряды неограниченны.
Если управление u(x) ≠ uопт(x), то в этом случае F ˃ 0 при сохранении числа переключений управления.
Кроме этого, должно быть соблюдено условие
x0 ≤ x1 ≤ x2 ≤ x3 ≤ xk ≤ x4 ≤ x5 ≤ x6 ≤ xцик, (8)
где xцик – значение аргумента по завершению цикла.
Отсюда следует вывод, что с учетом ограничений на формирование u(x) функционал (7) можно использовать как многопараметрическую функцию, минимизируя которую за счет варьирования моментов переключения (8) управления u(x) и частоты ω можно определить uопт(x). Таким образом, независимо от порядка уравнения (1), формируется единая вычислительная процедура определения uопт(x). Для упрощения вычислительного процесса можно принять условие ω = π/ (xk-x0)= 2π/ (xцик-x0).
Для поиска uопт(x) по предложенной процедуре важно определить начальное значение u(x) на интервале x0 ≤ x ≤ xk и на интервале xk ≤ x ≤ xцик, так как неправильная очередность моментов переключения приведет к несоблюдению условий оптимальности. Чтобы не задумываться над этим, достаточно увеличить на единицу число переключений на каждом интервале. На начальном этапе процедуры моменты переключений можно равномерно распределить на каждом интервале. Процедура поиска uопт(x) и формирование линейного закона управления на базе оптимального описана в [6].
Если не выполняется условие относительно действительности каких-либо собственных значений, то предложенная процедура не является корректной. Однако и в этом случае данная процедура может позволить с определенной долей приближения оценить максимально возможное быстродействие динамического объекта. В этом случае функционал (7) будет всегда отличным от ноля.
Необходимо отметить, что использование данной процедуры в любом случае может дать только приближенный результат, так как используемые тригонометрические ряды, ограниченные количеством членов сами являются приближенным описанием функции.
Рассмотренные примеры позволяют наглядно продемонстрировать справедливость сформулированного ранее свойства решения линейного дифференциального уравнения с постоянными коэффициентами.
Предположим, что цикл перевода дифференциального уравнения из начального состояния покоя Y0{y00; y01; … ;y0(n-1)}в конечное состояние покоя Yk{yk0; yk1; … ;yk(n-1)} и затем снова в начальное состояние покоя Y0 происходит многократно. В этом случае выражения, описывающие решения однородного дифференциального уравнения и частное решение неоднородного дифференциального уравнения останутся неизменными.
При бесконечном количестве циклов (аргумент равен бесконечности) компоненты решения однородного дифференциального уравнения, содержащие положительные действительные части собственных значений становятся по модулю бесконечно большими, что противоречит условию конкретных рассматриваемых примеров. Это противоречие исключается, если для данных компонент будет выполняться условие равенства нулю коэффициентов A, D и С.
При бесконечном количестве циклов (аргумент равен бесконечности) компоненты решения однородного дифференциального уравнения, содержащие отрицательные действительные части собственных значений становятся равные нулю для любого значения коэффициентов A, D и С. При этом очевидно, что в каждом цикле Y0 и Yk имеют одинаковые значения по условиям задачи. В связи с тем, что решение неоднородного дифференциального уравнения не зависит от количества циклов и значение его в моменты Y0 и Yk для каждого цикла одинаковы, следует, что краевые условия (Y0 и Yk) будут выполняться для любого цикла только в том случае, если будут обнуляться коэффициенты A, D и С.
Что же касается компонент решения однородного дифференциального уравнения, содержащие нулевые действительные части собственных значений, то в этом случае, если модули чисто мнимых собственных значений характеристического полинома уравнения (1) не являются кратными ω, коэффициенты A и D равны нулю по условию периодичности решения дифференциального уравнения (1).
Если модули чисто мнимых собственных значений характеристического полинома уравнения (1) являются кратными ω, то в этом случае значения амплитудно-частотной характеристики уравнения (1) на частотах соответствующих мнимым собственным значениям равны бесконечности. Это означает, что в соотношении (4), описывающее периодическое входное воздействие ua(x) коэффициенты, соответствующие этим частотам должны быть равны нулю по условию ограниченности функций. Таким образом, в общем решении дифференциального уравнения (1) для данного случая будут присутствовать компоненты решения однородного дифференциального уравнения.
Заключение
В статье рассмотрена вычислительная процедура для определения переходных процессов динамических объектов, описываемых линейными дифференциальными уравнениями с постоянными коэффициентами, которая не требует интегрирования дифференциального уравнения (1). В практической деятельности специалисты в области управления динамическими объектами предпочитают там, где возможно, проводить линеаризацию математической модели объекта управления. Это существенно облегчает процесс формирования управления. Поэтому линейные математические модели весьма распространены.
Использование данной процедуры позволяет создать единый подход к определению реакции динамического объекта на определенные воздействия.
Доступность и простота данной вычислительной процедуры позволяет на инженерном уровне решать задачи оптимизации управления динамическими объектами.
Кроме этого, предложенная процедура достаточно просто формализуется в универсальный алгоритм, который может стать частью математических прикладных программ, предназначенных для использования специалистами в области управления динамическими объектами.
Библиографический список:
Рецензии:
29.06.2016, 17:59 Мирмович-Тихомиров Эдуард Григорьевич
Рецензия: Нас вновь "пенсионер" Игорь Петрович обрадовал своей креативной работой. Любой последователь идей нестандартного анализа безусловно оценит достоинства этой работы. Рецензент очень давно "воюет" против преклонения универсальности числа "е в степени х" в высшей математике. Пренебрежение принципиальной некорректностью дифференциального исчисления, размерностями при принятии равенства самого числа его производной и его интеграла в аналитических и численных методах моделирования приводит к неустойчивостям решений, путанице и др. путаницам. "Только на первом шаге эта функция суперэффективна, позволяя перейти из дифференциального пространства в привычное для нас алгебраическое. Почти все дальнейшие шаги сопряжены с трудностями, отдельные из которых, как оказалось, теоретически непреодолимы" - если бы рецензент не знал, что это невозможно и что И.П. не читал его работы, то можно было бы подумать, что эта фраза взята оттуда. Аппроксимация решений функциями от этого числа также приводят к кажущимся упрощениям. Попытки найти пути в решении диффуров без использования "священной коровы" в виде этого якобы инварианта рецензентом поддерживаются благожелательностью. Практическое применение метода периодического (наверное, квазипериодического) воздействия к системам автоматического регулирования - собственно авторская заслуга. Приближение инкремента этого воздействия значением х=0, а декремента х=хп, также инструментальная находка автора. Новизна работы также неоспорима. Надо бы исправить синтаксические ошибки только и немного покорректировать оформление литературы по ГОСТу. Работа рекомендуется к публикации.
29.06.2016 22:22 Ответ на рецензию автора Утешев Игорь Петрович:
Уважаемый Эдуард Григорьевич! Я благодарен Вам за такую рецензию. Воспринимаю это как дружеское рукопожатие. Этому направлению я отдал почти тридцать лет с некоторыми перерывами. Еще со студенческой скамьи меня «поразили» две темы в курсе «Высшая математика». Это «Дифференциальные уравнения» и «Ряды Фурье». Эти темы сопровождают меня всю мою жизнь. И я этому необычайно рад, так как удалось что-то сформулировать. Постараюсь устранить все высказанные замечания. У меня сегодня ПРАЗДНИК. Здоровья Вам! Утешев И.П.
29.06.2016, 20:02 Наумов Владимир Аркадьевич
Рецензия: Тема исследования является актуальной. Статья содержит элементы научной новизны. Статья нуждается в доработке. Замечания: 1. Заключение совершенно не соответствует названию. Нужно либо менять название, либо заключение. 2. Автор не приводит ссылок на записанные формулы, как будто все они авторские. Можно не приводить ссылки только на общеизвестные формулы, например, на (1) и (2). 3. Имеются утверждения, которые требуют либо ссылки, либо доказательства, если они авторские: - "общее решение дифференциального уравнения (1) для u(x)= ua(x) будет также ограниченная периодическая функция ya(x) с периодом ω", и др. 4. Оформление библиографического списка имеет отклонения от ГОСТа. В частности, в первом не указано колическтво страниц.
01.07.2016 7:07 Ответ на рецензию автора Утешев Игорь Петрович:
Уважаемый Владимир Аркадьевич! Всегда считал, что идея выше формы, так как идея – отражение замысла Творца, а форма – признак принадлежности … . Из-за этого многое упустил. Благодарю за рецензию. Постараюсь исправить все замечания. Спасибо, что прочитали статью, проявили интерес и отметили новизну. Попытка увидеть новизну в архаичной теме всегда является борьбой с собственными стереотипами, предубеждениями и мнением окружения (коллег). Я сам испытал это в полной мере. Здоровья Вам! Утешев И.П.
7.07.2016, 16:13 Наумов Владимир Аркадьевич
Рецензия: Повторная. Большая часть недостатков устранена. Статья может быть рекомендована к публикации.
15.07.2016 19:19 Ответ на рецензию автора Утешев Игорь Петрович:
Уважаемый Владимир Аркадьевич! Благодарю, что заставили трудиться. Спасибо за положительную рекомендацию. Утешев И.П.
13.07.2016, 10:00 Бондарь Иван Михайлович
Рецензия: Бондарь Иван Михайлович. Работа интересная как в теоретическом плане, так и в плане практического применения. Рекомендую к публикайии
15.07.2016 20:20 Ответ на рецензию автора Утешев Игорь Петрович:
Уважаемый Иван Михайлович! Ваша оценка всеобъемлюща, так как в душе я остаюсь инженером. Спасибо за положительную рецензию. Здоровья Вам. Утешев И.П.
Комментарии пользователей:
30.06.2016, 10:56 Мирмович-Тихомиров Эдуард Григорьевич
Отзыв: Уважаемый Игорь Петрович! Я вынужден добавить, что согласен с Владимиром Аркадьевичем в части названия статьи - я это пропустил. В названии должны быть слова об адаптации созданного синтетического инструмента к задачам автоматизации управления, либо разбить статью на две. Ссылка на какую-либо фундаментальную работу в области диффуров также необходима, может, на Н.Н. Лузина, да даже на Илью Николаевича и Константина Адольфовича. Посмотрите сами. Я был в восторге от придания скромности числу е в степени х и на остальное не обратил внимания. Попутно выражаю уважение В.А. Наумову.