24/7
Уважаемые читатели!
В предыдущей статье «Новый метод анализа систем автоматического регулирования. (Метод периодического воздействия)» фрагмент переходной функции был связан с характером доминирующего изменения переходной функции (колебательным или апериодическим). Это, безусловно, некоторое упрощение, позволяющее на инженерном уровне охарактеризовать в целом исследуемую систему автоматического управления. Такой взгляд на исследуемую систему бытует в среде специалистов-практиков, хотя и неофициально. Автору близок такой подход со всеми его плюсами и минусами.
Для более детального подхода к исследуемой системе целесообразно иметь возможность получить переходную функцию в большем временном диапазоне. Это позволит гарантированно и более точно определять критерии качества исследуемой системы.
Для построения переходных функций, как и в ранее упомянутой статье, автор исключает этап численного интегрирования систем дифференциальных уравнений, а прибегает к изменению математической модели исследуемой системы автоматического управления.
В настоящей статье автор демонстрирует в большей степени возможности предлагаемого подхода к исследованию линейных систем автоматического управления.
Приятного чтения.
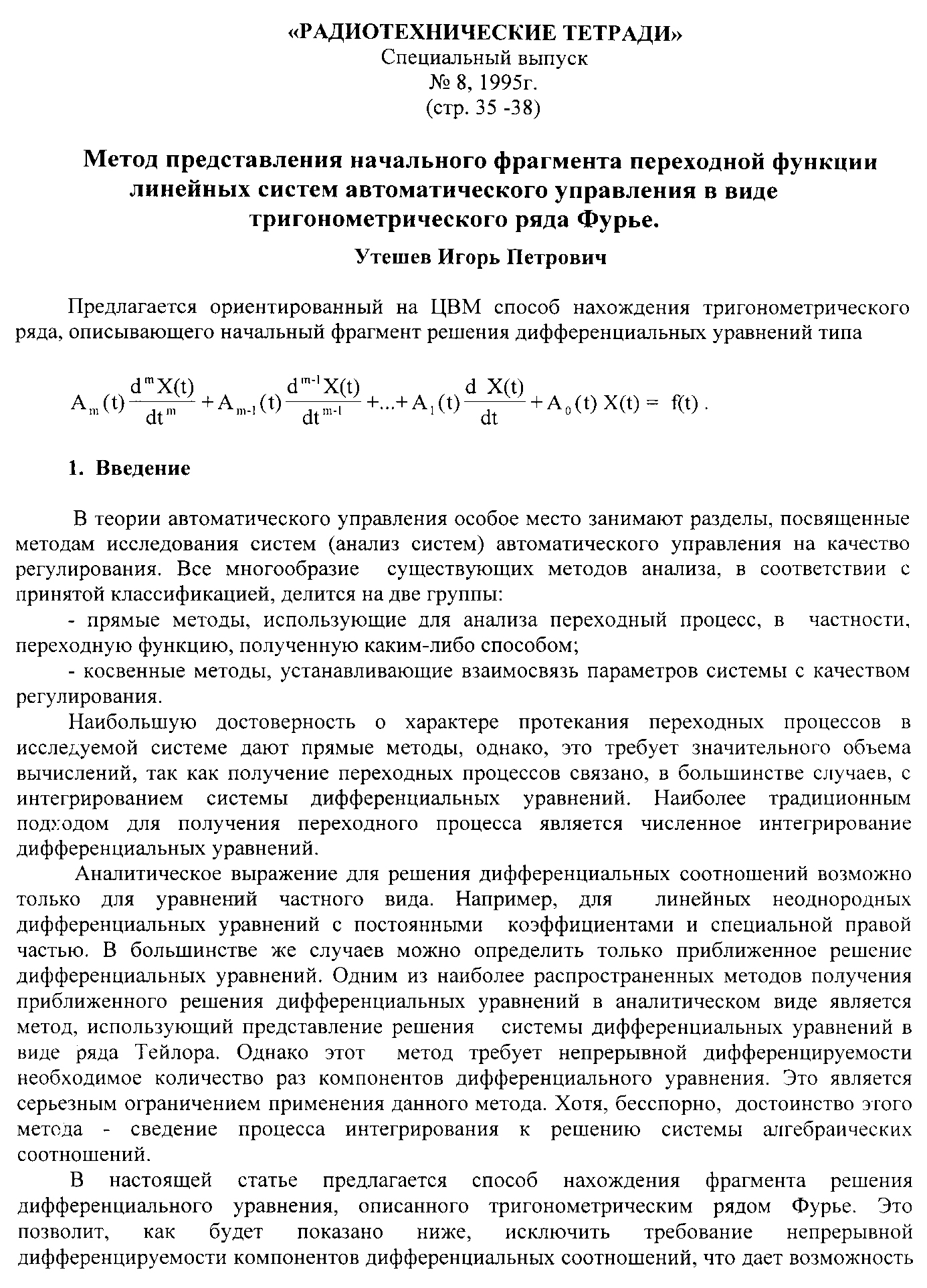
Рис. 1
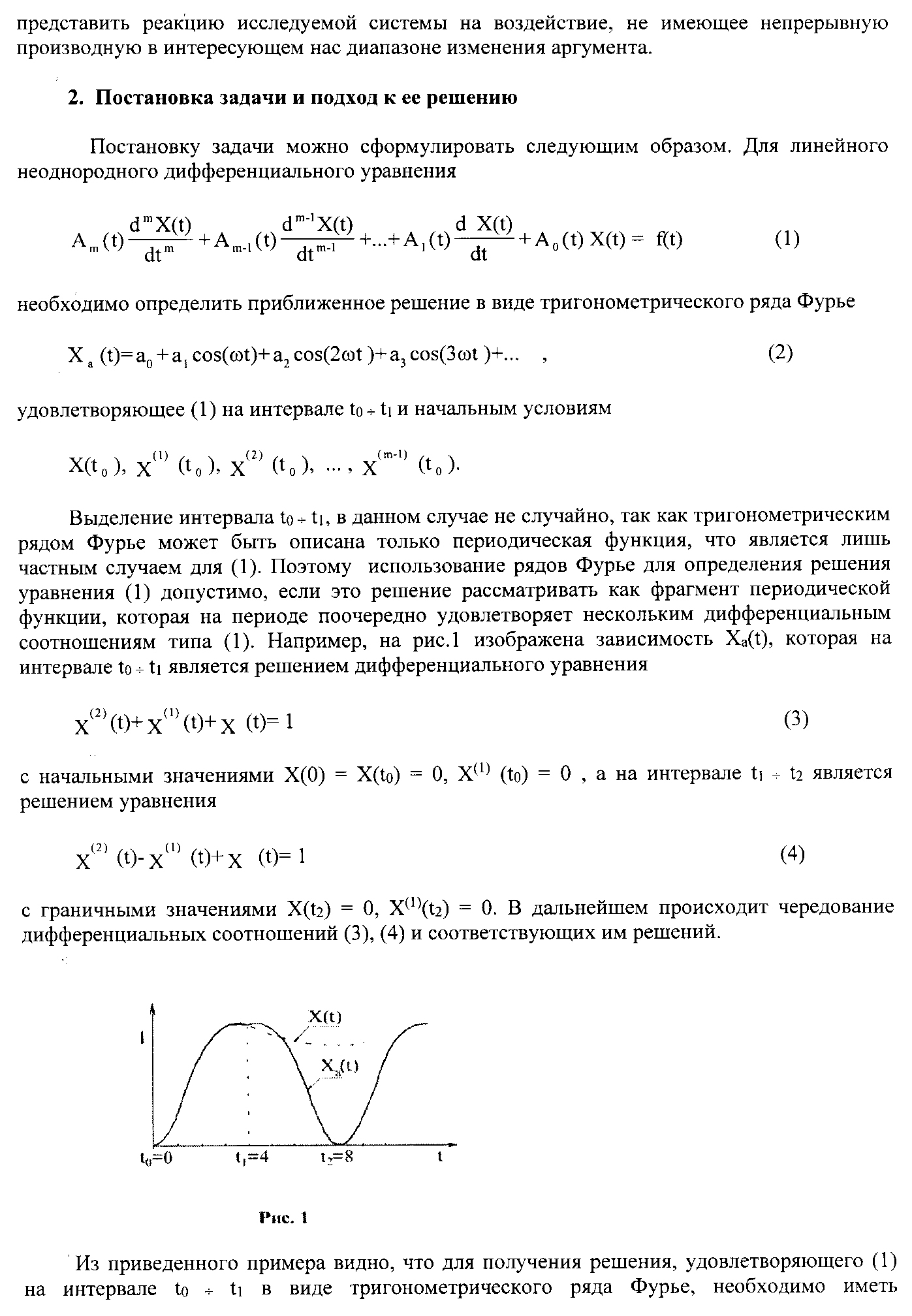
Рис.2
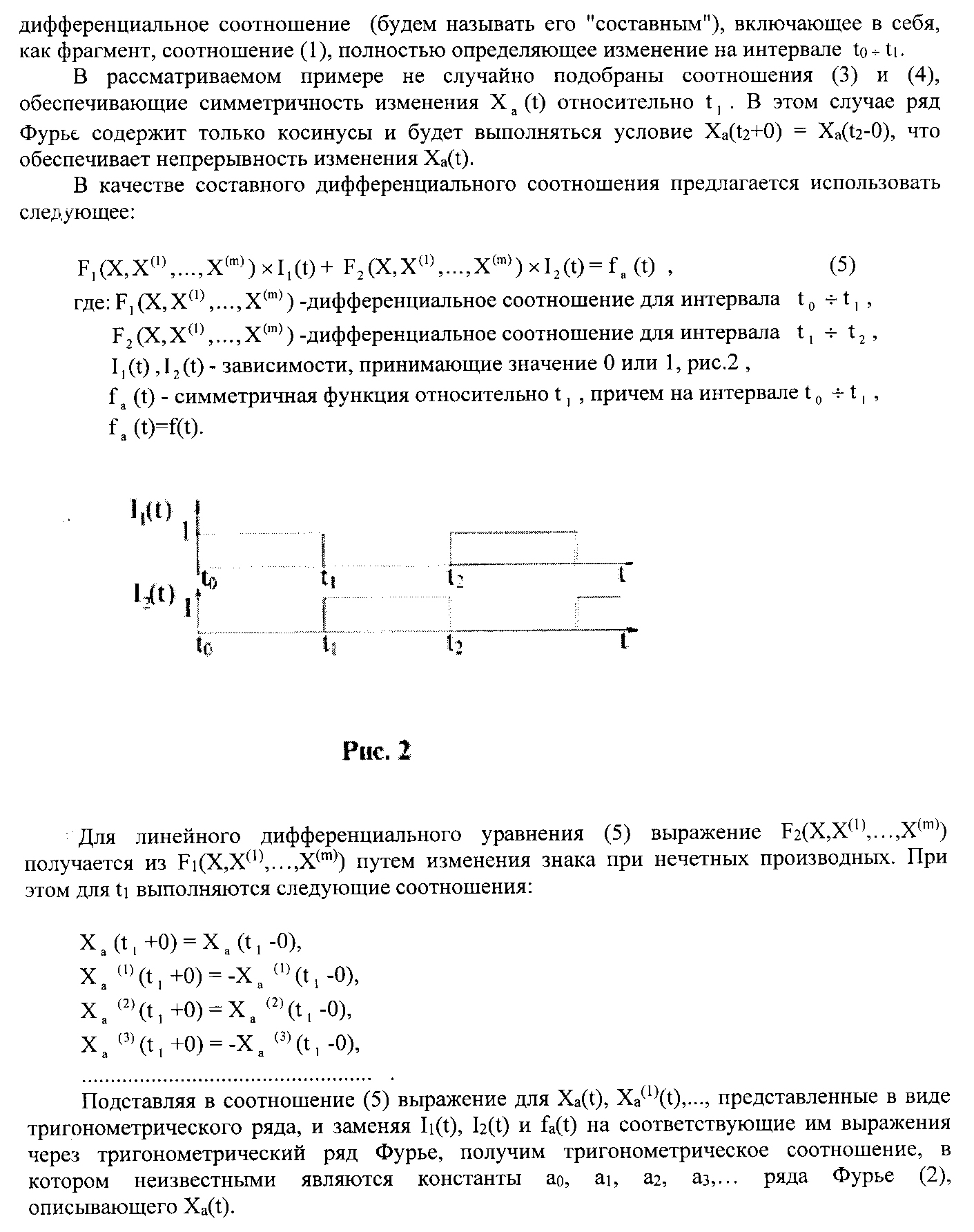
Рис.3
Рис.4
Рис.5
Рис.6